You are here
Underwater Robotics Succeed In Unlikely Place
06/12/13 Portland, Ore.
Scientists who use underwater robotic vehicles tend to operate them in conditions where the water is fairly calm and slow moving like coral reefs or lakes. But not Craig McNeil, he likes to operate in a daunting place with strong currents, turbid waters, and ever-changing depths - the Columbia River estuary.
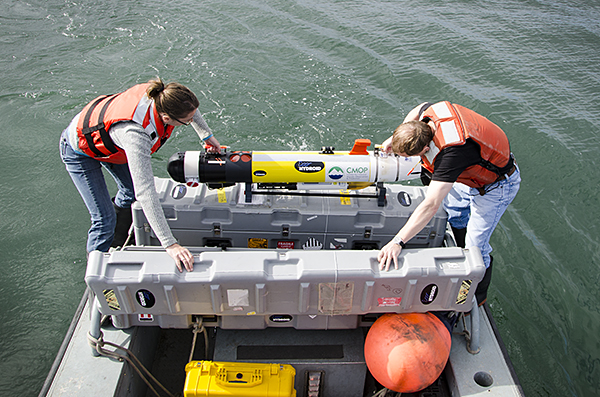 Craig McNeil (right) and Trina Litchendorf remove AUV from case and prepare to deploy it in the North Channel of the Columbia River estuary. Enlarge“I believe this is a unique environment for an autonomous underwater vehicle,” said McNeil, a Center for Coastal Margin Observation & Prediction (CMOP) scientist in the Applied Physics Lab at the University of Washington (APL-UW). “While there are lots of engineering challenges to making it work in these dynamic conditions, this technology is an important tool to improve our scientific understanding of the physics, chemistry, and biology of the estuary.”
Craig McNeil (right) and Trina Litchendorf remove AUV from case and prepare to deploy it in the North Channel of the Columbia River estuary. Enlarge“I believe this is a unique environment for an autonomous underwater vehicle,” said McNeil, a Center for Coastal Margin Observation & Prediction (CMOP) scientist in the Applied Physics Lab at the University of Washington (APL-UW). “While there are lots of engineering challenges to making it work in these dynamic conditions, this technology is an important tool to improve our scientific understanding of the physics, chemistry, and biology of the estuary.”
Autonomous Underwater Vehicles, simply called AUVs, are 5-foot-long black, white and yellow robotic devices equipped with navigational equipment and oceanographic instruments. AUVs survey, map, and take scientific measurements in marine environments as they follow a preprogrammed path.
“The advantage of using AUVs over research vessels is they can perform repetitive surveys in a confined area with constantly changing depths,” McNeil said, “You can take measurements along gradients much more quickly than on a ship and get a better picture of the fields you are studying.”
 Andrey Shcherbina sends a command to the AUV from a communication device called the Ranger. EnlargeCMOP is using AUVs as part of the SATURN Collaboratory to study how climate change and human stresses affect estuaries and nearby coastal waters. The AUVs perform biological and physical studies of plankton blooms and the estuary turbidity maxima. The information gathered is used to understand how the estuary functions and enhance numerical models to improve forecasts and predictions.
Andrey Shcherbina sends a command to the AUV from a communication device called the Ranger. EnlargeCMOP is using AUVs as part of the SATURN Collaboratory to study how climate change and human stresses affect estuaries and nearby coastal waters. The AUVs perform biological and physical studies of plankton blooms and the estuary turbidity maxima. The information gathered is used to understand how the estuary functions and enhance numerical models to improve forecasts and predictions.
“We have equipped the AUV with different science payloads to study a variety of things including algal blooms,” McNeil said. “The Columbia River estuary has blooms of non-toxic, red colored algae called Mesodinium rubrum that form in late summer. We have successfully used the AUV to measure its red fluorescence signals to profile the algae’s depth throughout the estuary.”
Another success of the AUV team was to measure optical backscatter or turbidity (cloudiness) of the water. This provides detailed information about the estuary turbidity maxima (ETM), a “biological hotspot” in the estuary. The ETM is formed when the salt water comes into the estuary and mixes with fresh water. The result brings sediment up into the water column where unique microbial life are formed or altered. CMOP is studying if and how the ETM has a biogeochemical impact on the food web in the estuary.
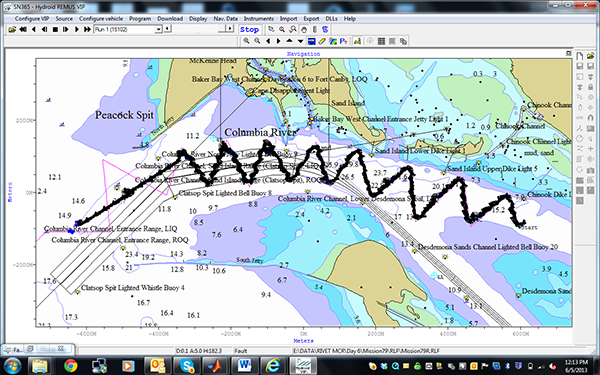 This figure shows the model setup on the morning before the AUV was deployed, and the actual path the AUV took. The mission isn’t exactly the same as planned because there was a container ship nearby and the team altered the course (sent an underwater acoustic command from Ranger) so that the AUV would swim directly to the end point for pickup to avoid the container ship. EnlargeBefore any research mission can get started, McNeil and his team have to figure out how to maneuver the AUV in such a harsh environment. The AUV is equipped with a propeller that only allows it to travel at a speed of about 4 knots. That is no match for the strong currents in the Columbia River.
This figure shows the model setup on the morning before the AUV was deployed, and the actual path the AUV took. The mission isn’t exactly the same as planned because there was a container ship nearby and the team altered the course (sent an underwater acoustic command from Ranger) so that the AUV would swim directly to the end point for pickup to avoid the container ship. EnlargeBefore any research mission can get started, McNeil and his team have to figure out how to maneuver the AUV in such a harsh environment. The AUV is equipped with a propeller that only allows it to travel at a speed of about 4 knots. That is no match for the strong currents in the Columbia River.
To over come this challenge, the CMOP modeling team supplies McNeil’s team with forecasts of conditions of the estuary including currents, temperature, and salinity. They take that information and use it in a simulator.
“The simulator allows us to take the CMOP model forecast of the Columbia River estuary environment and fly a 'virtual AUV' through it,” said Andrey Shcherbina, an oceanographer from APL-UW. “This simulation allows us to predict what conditions our AUV might encounter during the actual deployment the following day and what data it might sample. It helps us to plan the optimal timing and routing for each mission."
 The AUV is retrieved from the Pacific Ocean after traveling through the mouth of the Columbia River. Watch video of AUV being retrievedRecently, CMOP operated AUVs in collaboration with Dr. Andy Jessup (APL-UW) during an Office of Naval Research initiative called RIVET-II to study processes in coastal inlets and river mouths. An AUV was sent through the mouth of Columbia River, no small engineering feat in such treacherous conditions. McNeil and his team deployed the vehicle in the North Channel on several ebb tides to collect information about the currents and mixing across the Bar, identify oceanographic features (liftoff point, internal waves, eddies/rolls/boils), and suspended sediment distributions.
The AUV is retrieved from the Pacific Ocean after traveling through the mouth of the Columbia River. Watch video of AUV being retrievedRecently, CMOP operated AUVs in collaboration with Dr. Andy Jessup (APL-UW) during an Office of Naval Research initiative called RIVET-II to study processes in coastal inlets and river mouths. An AUV was sent through the mouth of Columbia River, no small engineering feat in such treacherous conditions. McNeil and his team deployed the vehicle in the North Channel on several ebb tides to collect information about the currents and mixing across the Bar, identify oceanographic features (liftoff point, internal waves, eddies/rolls/boils), and suspended sediment distributions.
The AUV traveled out the estuary and through the mouth of the Columbia River, considered one of the most dangerous and challenging navigated stretches of water in the world. The seas are rough here because the volume of water flowing from the Columbia River collides with the force of the Pacific Ocean.
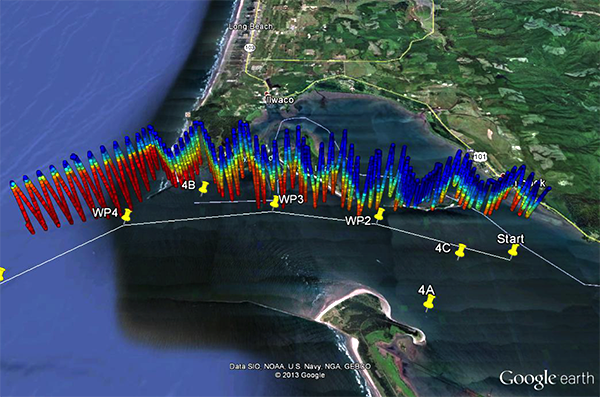 Salinity profile collected by AUV. Fresh less dense river water (blue) flows seaward over salty and denser ocean water (red). Enlarge“Sending the vehicle out the river and back in was quite a challenge and accomplishment for our team,” said Trina Litchendorf, an oceanographer from APL-UW. “We ran several one-way missions that sent the vehicle out the mouth of the Columbia River on the ebb tide and into the ocean where we retrieved it. We also ran a continuous mission where we sent the AUV out the river on the ebb tide into the ocean, where it loitered underwater for a period of time before it returned from the sea and swam back through the bar and up the river on a flood tide.”
Salinity profile collected by AUV. Fresh less dense river water (blue) flows seaward over salty and denser ocean water (red). Enlarge“Sending the vehicle out the river and back in was quite a challenge and accomplishment for our team,” said Trina Litchendorf, an oceanographer from APL-UW. “We ran several one-way missions that sent the vehicle out the mouth of the Columbia River on the ebb tide and into the ocean where we retrieved it. We also ran a continuous mission where we sent the AUV out the river on the ebb tide into the ocean, where it loitered underwater for a period of time before it returned from the sea and swam back through the bar and up the river on a flood tide.”
The data the AUV collected provided a clearer picture of the dynamics of the estuary as salt water entered and freshwater was pushed out to sea. It mapped and took measurements of the turbulence and mixing that occurred with tides. The data collected will be used to enhance the forecasting and predictive models CMOP is developing. The results will provide better management tools for mitigating problems and managing estuaries and coastal waters for a long healthy life.
Written by Jeff Schilling




